●由台灣自主研發的自動駕駛技術
●「日常行駛」及「定線接駁」模式體驗
●預計最快2019年可開放民眾搭乘

鮮有人知台灣在自駕領域亦有所涉略,畢竟我國半導體及科技代工產業發達,在科技領域的研發上具先天優勢,但ARTC相信代工產業難以觸及技術核心而起了自行研發的念頭。
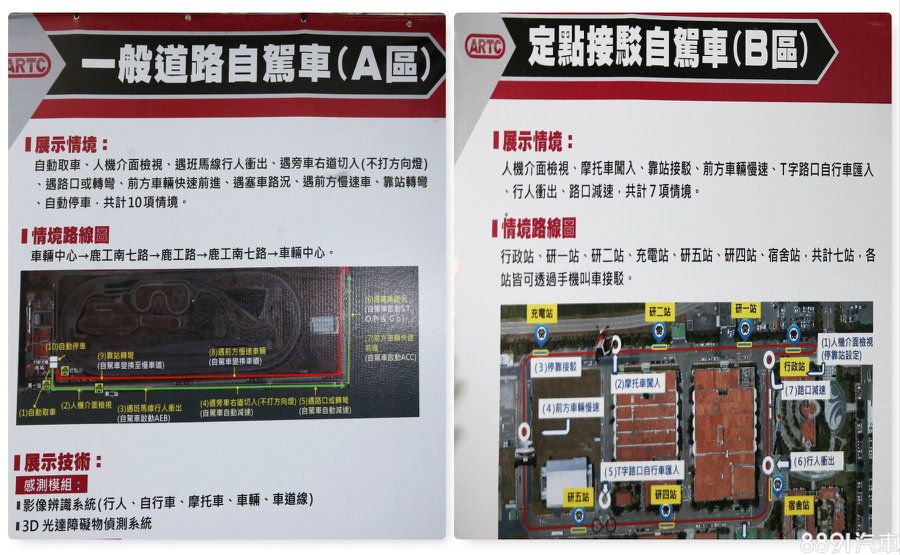
ARTC於日前舉辦自駕體驗活動,並依用路環境分為一般道路的「日常行車自駕」及固定路線和停靠站點的「接駁車自駕」兩模式。前者體驗用車型為市場上可購得之小客車,後者則為高爾夫球車,兩車均加裝有ARTC所開發之自駕系統。

基於既有之「先進駕駛輔助系統ADAS」延伸而來的自駕系統,藉由單筒攝影機和立體光學雷達,同時以結合GPS、慣性感測器及圖資的模組蒐集路況資訊,再透過決策控制模組決定車輛動態並執行油門、煞車或轉向等操作。系統可藉手機或平板顯示車輛資訊供使用者掌握,而日常模式體驗用之測試車則增備了毫米波雷達。

牌照上方方盒為此測試車增配的毫米波雷達。測試車各系統的改裝均為額外加裝,因此理論上可搭載於各式車型,然機構仍盼能藉車廠合作提高系統與車輛之整合性。

在日常模式的自駕體驗中,搭載自駕系統之原型車(淺藍色U6)以未管制之一般道路為主要體驗環境,亦即過程中可能會遇上未預期之廠外車輛,但為了確保體驗重點,機構仍安排了台灣高速公路環境常見的惡意超車及前方慢車等用路狀況。

ARTC過去便曾展演過其自動化技術,本次體驗主要著重在當測試車遇上特殊路況時,是否能妥善處理。就結果而言,測試車在行駛的平穩度及轉向均有不錯的表現,尤其超車動作之順暢度更是出乎預期。不過,在減速過程中,剎車力道會較人為踩踏顯得強勁急促,對乘客而言較不具舒適性。對此,負責開發的工程團隊表示該情況將會在商業化前進行改善。

另一階段的體驗活動採固定路線及站點的接駁車式情境,車輛同樣採自駕操作,而乘客僅須透過操作介面設定停靠站點及啟動駕駛。除了測試車輛能否依照系統設定運行,更考驗系統在面對前方行人及其他突發障礙時能否順利應對。

不同於前述一般道路系統仍待車廠合作意願,固定路線及站點讓營運管理上更為容易,較慢的車速及相對封閉的環境也減少外在可變因素,機構認為後者短期內將系統實務化的可能性高;為了吸引外界支持,ARTC已規劃自2019年起於彰濱工業區中的四個觀光工廠或園區建立自駕接駁系統供民眾搭乘,

由於國外車廠多有自行開發之自駕系統,除非是我國自主品牌,否則即便是國產品牌,如有外資背景者為避免與原廠系統互打,採用我國獨立開發之系統的機率不高。機構同感表示希望能獲得產業界更多支持與合作,並相信台灣自有技術也能有向外輸出的機會。